
Что такое шаговый двигатель. Блок управления шаговым двигателем на таймере NE555 (КР1006ВИ1).
Что такое шаговый двигатель.Блок управления шаговым двигателем на таймере NE555 (КР1006ВИ1).
![]()
Принцип работы шагового двигателя заключается в повороте его вала на определенный угол при поступлении чередующихся импульсов, поступающих на соответствующие обмотки. Управляется данный двигатель с помощью электронной схемы – драйвера, ее еще называют контроллером шагового двигателя.
Плюсами шагового двигателя являются точность позиционирования вала, то есть точное его перемещение на определенный угол, это зависит от количества поступивших на обмотки импульсов, данный двигатель более надежен в связи с отсутствием щеточного механизма (его ресурс ограничивается сроком службы подшипников), с помощью такого двигателя можно добиться сверхнизкой частоты вращения вала, не применяя при этом редукторных механизмов, двигатели такого типа обладают широчайшим диапазоном скорости вращения, это зависит от количества приходящих на обмотки импульсов.
Разновидности шаговых двигателей:
В последнее время в основном промышленность выпускает гибридные шаговые двигатели, которые различаются по количеству и конфигурации обмоток.
● Биполярные ШД — имеют две обмотки, четыре вывода;● Униполярные ШД — имеют две обмотки, шесть выводов;● Четырехобмоточные ШД — имеют четыре обмотки, восемь выводов.
Чтобы с обмотками было понятнее – смотрите следующее изображение:
У последнего варианта, если соединить выводы “А-штрих” с “В” , и “С-штрих” с “D”, получите биполярный шаговый двигатель.
Пример внутреннего строения обмоток шагового двигателя:
К недостаткам шагового двигателя можно отнести подверженность его резонансу, низкий уровень удельной мощности на валу, низкий момент на высокой скорости вращения, и не снижение потребляемой энергии при отсутствии нагрузки на валу.
Цель данной статьи не рассматривать отдельные нюансы шаговых двигателей, мы изложили лишь общие понятия его устройства и принципа работы. Таким образом мы вплотную подошли к устройству блока управления ШД.
В сети можно найти множество схемных решений контроллеров ШД, основанных на применении программируемых микроконтроллеров, ну а мы сейчас рассмотрим принципиальную схему управления однополярным ШД, реализованную на микросхеме-таймере NE555, отечественным аналогом которой является КР1006ВИ1. На этой микросхеме собран тактовый генератор прямоугольных импульсов. Эти импульсы поступают на устройство (микросхемы D2 и D3), которое обеспечивает подачу импульсов управления на соответствующие обмотки двигателя в нужном порядке для того, чтобы вал нашего двигателя начал вращаться. Управляющие импульсы на обмотки поступают через ключи VT1…VT4. Скорость вращения вала ШД изменяется вращением ручки переменного резистора R1. Принципиальная схема блока управления изображена на рисунке ниже:
Зарубежные микросхемы и их отечественные аналоги: CD4070 — К561ЛП14 ; CD4027 — К561ТВ1.
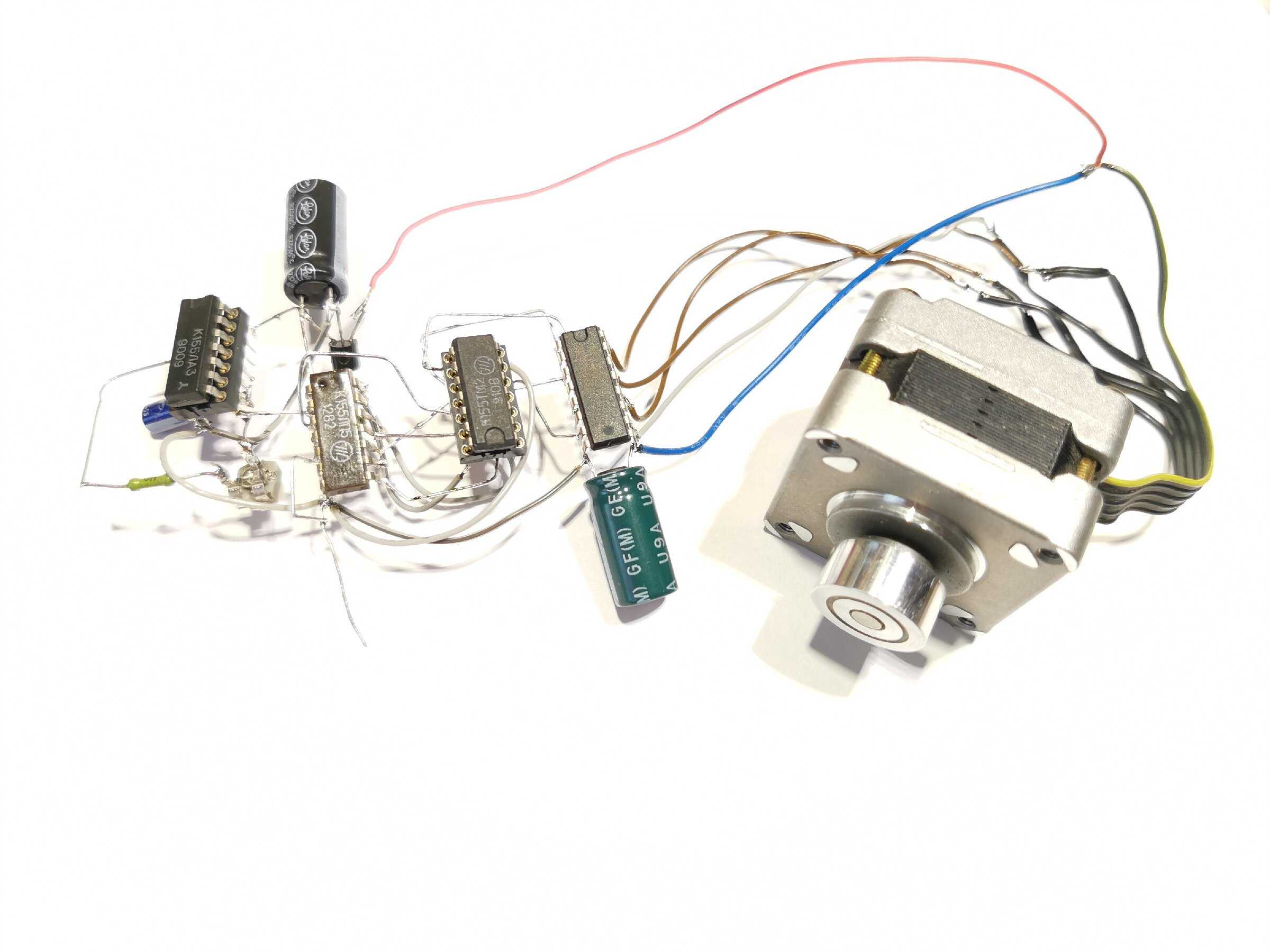
В качестве дополнения к статье приведем пример еще одной не сложной схемы управления ШД , которые применялись в дисководах 5,25″.
Схема собрана на следующих элементах:
— DD1 — К561ЛА7;— DD2 — К561ИЕ14;— DD3 — К555ИД7;— DD4, DD5 — К155ЛИ5.
Печатная плата выглядит следующим образом:
![]()
![]()
И последний довесок к статье без описания, может быть кому и пригодится:
Элементы указаны на схеме, переключатель S1 – реверс вращения.
Назначение и основные виды
В общем случае линейный электродвигатель, также как и электромотор с вращающимся приводным механизмом обеспечивает механическое перемещение рабочих частей оборудования, но в одной координатной плоскости. Это могут быть двигатели для чпу, конвейеров, транспортеров, промышленных роботов и других производственных агрегатов. Подобные группы механизмов широко используются в сфере электротранспорта. Отличительная особенность приводных устройств состоит в обеспечении линейных перемещений без механических передач. Они относятся к машинам малой мощности, но в то же время достаточной, чтобы выполнять обширный перечень рабочих задач.
![]()
В зависимости от конструктивных особенностей структурных элементов и принципа действия различают следующие типы линейных двигателей (ЛД):
- электромагнитные (соленоидные);
- магнитоэлектрические (двигатель на постоянных магнитах);
- электродинамические;
- асинхронные (индукционные);
- синхронные;
- линейные шаговые двигатели;
- пьезоэлектрические и другие.
Отдельные ЛД, например, асинхронные или линейные шаговые двигатели, имеют идентичный принцип действия относительно аналогичных электромоторов с вращательным механизмом. В то же время другие эл/приводы, такие как линейные пьезоэлектрические двигатели, соответствующих аналогов не имеют. В зависимости от типа эл/мотора они могут обладать разными параметрами скорости, нагрузочными характеристиками и подключаться к питающей сети 48, 36, 24 или 12 вольт.
Относительно показателя динамичности, то есть способности быстро развивать нужную скорость, линейные приводы подразделяются на две группы:
- с низким ускорением;
- с высоким.
Первая категория электромоторов находит применение в качестве тяговых механизмов транспортных средств, в металлообрабатывающем станочном оборудовании, иных технологических установках. Например, линейные асинхронные двигатели являются оптимальным вариантом для приведения в действие ленточных конвейерных агрегатов. Моторы второй группы относятся к малогабаритным решениям и предназначены для кратковременного разгона объектов.
К категории приводных устройств прямолинейного перемещения также относят свободно-поршневые или линейные двигатели внутреннего сгорания. Это обусловлено возвратно-поступательным движением поршня, являющимся основной рабочей частью мотора. При этом рабочий орган двигательной системы находится в замкнутом цилиндрическом объеме и приводится в действие разными способами.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями – полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
![]()
Полный шаг – такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг – поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
| Шаговый двигатель Nema17 42BYGH 1.7A (17HS4401-S) для 3D принтера | Набор из 5 шаговых двигателей ULN2003 28BYJ-48 с платам драйверов для Ардуино | Шаговый двигатель с модулем драйвера 5V Stepper Motor 28BYJ-48 + ULN2003 |
| Еще один вариант шагового двигателя для Arduino 28BYJ-48 5V 4 Phase DC Motor + ULN2003 Drive Test Board | Набор из трех шаговых двигателей Nema17 Stepper Motor 42BYGH 1.7A (17HS4401) для 3D приентера | AliExpress.com Product – 3D Printer Parts StepStick A4988 DRV8825 Stepper Motor Driver With Heat sink Carrier Reprap RAMPS 1.4 1.5 1.6 MKS GEN V1.4 board |
Шаговые электромоторы
Линейные шаговые двигатели преобразуют последовательность электрических сигналов не во вращательное, а в поступательное прямолинейное движение. Они применяются в технологиях, требующих перемещения объектов в плоскости. Это могут быть двигатели для ЧПУ станков или графопостроители современных ЭВМ. Использование линейного шагового двигателя упрощает кинематическую схему эл/привода.
Плоский статор изготавливается из магнитомягкого материала. Для подмагничивания магнитопроводов устанавливаются постоянные магниты. Якорь ЛД перемещается в соответствии с принципом аналогичным мотору вращения только в прямолинейном направлении. Для этого на плоскости подвижной и неподвижной части выполнены зубцы равных размеров. В пределах одной секции бегуна линейного шагового двигателя зубцы смещены на половину своей ширины t/2, а во второй части – на четверть t/4. При этом вне зависимости от места расположения бегуна, обеспечивающего процесс подмагничивания, магнитное сопротивление будет оставаться одинаковым.





Линейные шаговые двигатели между статором и подвижной частью имеют минимальный магнитно-воздушный зазор, через который происходит взаимодействие. При этом практически отсутствует сопротивление перемещению, в результате линейный шаговый двигатель обеспечивает высокоточное позиционирование.
Линейный актуатор в традиционном исполнении представляет собой линейные двигатели постоянного тока, выполненные на базе коллекторных моторов. В подобных устройствах вращение преобразовывается в поступательное движение посредством редуктора, гайки и длинного винта, соединенных с выходным валом. В связи с тем, что такая конструкция не способна обеспечить точность перемещения или требуемые параметры скорости применяют электропривод с шаговым двигателем вращения, у которого вместо стандартного вала реализуется одна из следующих конструкций:
- удлиненный вал с внешней гайкой;
- выдвижной шток
- полый вал с внутренней гайкой.
Линейный шаговый двигатель или актуатор первого вида имеет в своей конструкции удлиненный вал с нанесенной на него резьбой и гайку, поступательно перемещающуюся вдоль вала. При этом сама гайка стационарна. Длина винта-вала соответствует длине хода.
Во втором случае линейный шаговый двигатель обеспечивает прямолинейное движение посредством выдвижного штока и соединенного с ним выходного вала с резьбой. Приложение внешней нагрузки производится непосредственно на шток.
Вариант полой центральной части с внутренней гайкой предусматривает установку ходового винта. Последний по мере вращения гайки движется параллельно своей оси и может выходить по обе стороны эл/мотора.
Линейные шаговые двигатели в виде актуаторов предназначены для построения систем с поступательным перемещением объектов с небольшой скоростью и высокой точностью при работе в ограниченных рабочих пространствах.
Схема мультивибратора
Изготовить металлоискатель на микросхеме 555 сможет любой начинающий радиолюбитель, но для этого нужно изучить особенности работы этого прибора. Мультивибратор – это специальный генератор, который вырабатывает с определенной периодичностью прямоугольные импульсы. Причем строго задается амплитуда, длительность и частота – зависят значения от того, какая задача стоит перед устройством.
![]()
Для формирования повторяющихся сигналов применяются резисторы и конденсаторы. Длительность сигнала t1, паузы t2, частоту f, и период T можно найти по следующим формулам:
- t1=ln2*(R1+R2)*C=0,693*(R1+R2)*C;
- t2=0,693*C*(R1+2*R2);
- T=0,693*C*(R1+2*R2);
- f=1/(0,693*C*(R1+2*R2)).
Исходя из этих выражений, можно увидеть, что пауза по длительности не должна быть больше времени сигнала
Другими словами, скважность не будет никогда больше 2. От этого напрямую зависит практическое применение микросхемы 555
Схемы различных устройств и конструкций строятся по даташитам — инструкциям. В них даны все возможные рекомендации для сборки приборов. Скважность можно найти по формуле S=T/t1. Чтобы увеличить этот показатель, необходимо добавить в схему полупроводниковый диод. Его катод соединяется с шестой ножкой, а анод с седьмой.
![]()
Если посмотреть в даташит, то в нем указывается обратная величина скважности – ее можно посчитать по формуле D=1/S. Измеряется она в процентах
Работу схемы мультивибратора можно описать следующим образом:
- При подаче питания конденсатор полностью разряжен.
- Таймер переводится в высокоуровневое состояние.
- Конденсатор накапливает заряд и на нем напряжение достигает максимума – 2/3 от питающего.
- Происходит переключение микросхемы и на выходе появляется низкоуровневый сигнал.
- Конденсатор разряжается в течение t1 до уровня 1/3 от питающего напряжения.
- Микросхема 555 переключается снова и на выходе образуется опять высокоуровневый сигнал.
Такой режим работы называется автоколебательным. На выходе постоянно изменяется величина сигнала, микросхема-таймер 555 равные промежутки времени находится в различных режимах.
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
![]()
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Как же это выглядит на деле?
![]()
Понять механизм действия шагового двигателя поможет схематическое изображение. первая позиция: на обмотки А и В подается напряжение установленной полярности.
Затем в статоре формируется электромагнитное поле. в силу того, что разноименные полюса притягиваются, ротор примет свою позицию по оси магнитного поля.
Кроме этого, поле шагового двигателя защищает от возможных действий с целью поменять позицию ротора снаружи. Упростив длинные объяснения, можно сказать так: магнитное поле статора обеспечивает установленную позицию ротора, несмотря на тяжесть.
При условии, когда на обмотки D и С попадает напряжение такой же полярности, электромагнитное поле меняет положение.
![]()
При этом ротор совершает шаг номер два, поворачиваясь на девяносто градусов. Третий шаг совершается, когда на обмотки А и В попадает напряжение обратной полярности.



При этом, ротор перемещается к положению, равному ста восьмидесяти градусам и устанавливается в положении, диаметрально противоположному первому.
Далее следует смещение к двумстам семидесяти градусам, когда на обмотки D и C приходится напряжение обратной полярности. Последний, четвертый шаг, совершается, когда на обмотки А и В подается напряжение с позитивным зарядом.
Таким образом, поворот станет равен тремстам шестидесяти градусам. Пропустить один из шагов не удастся. Ротор должен пройти полный оборот, шаг за шагом.
Если попытаться подключить обмотки из первого положения в четвертое, ротор сделает поворот в обратную сторону.
Преимущества ТТР
![]()
К преимуществам реле относят:
- возможность коммутации сравнительно мощных нагрузок;
- высокое быстродействие;
- работа в условиях гальванической развязки;
- способность выдерживать кратковременные перегрузки.
Уникальные эксплуатационные характеристики ТТР позволяют применять их без каких-либо ограничений с одновременным увеличением ресурса срабатываний. Все перечисленные достоинства этих приборов являются прекрасным поводом для того, чтобы попытаться собрать твердотельное реле своими руками. К минусам этих изделий следует отнести необходимость дополнительного питания, а также потребность в отводе излишков тепла, образующегося при работе с мощными нагрузками.
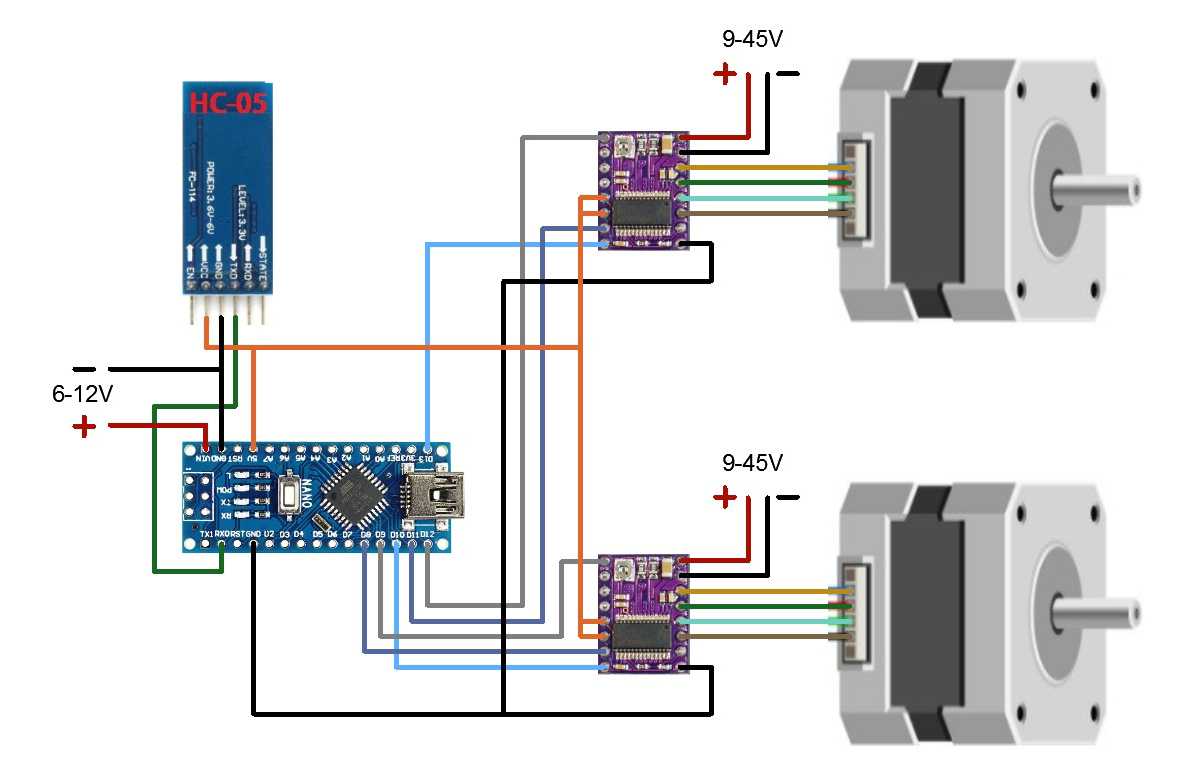
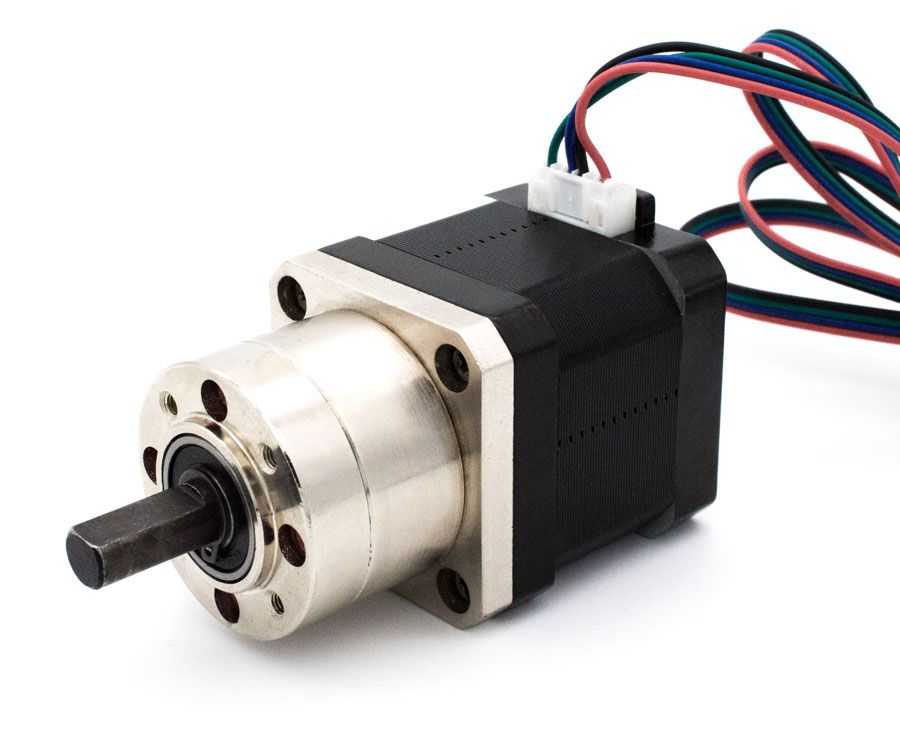
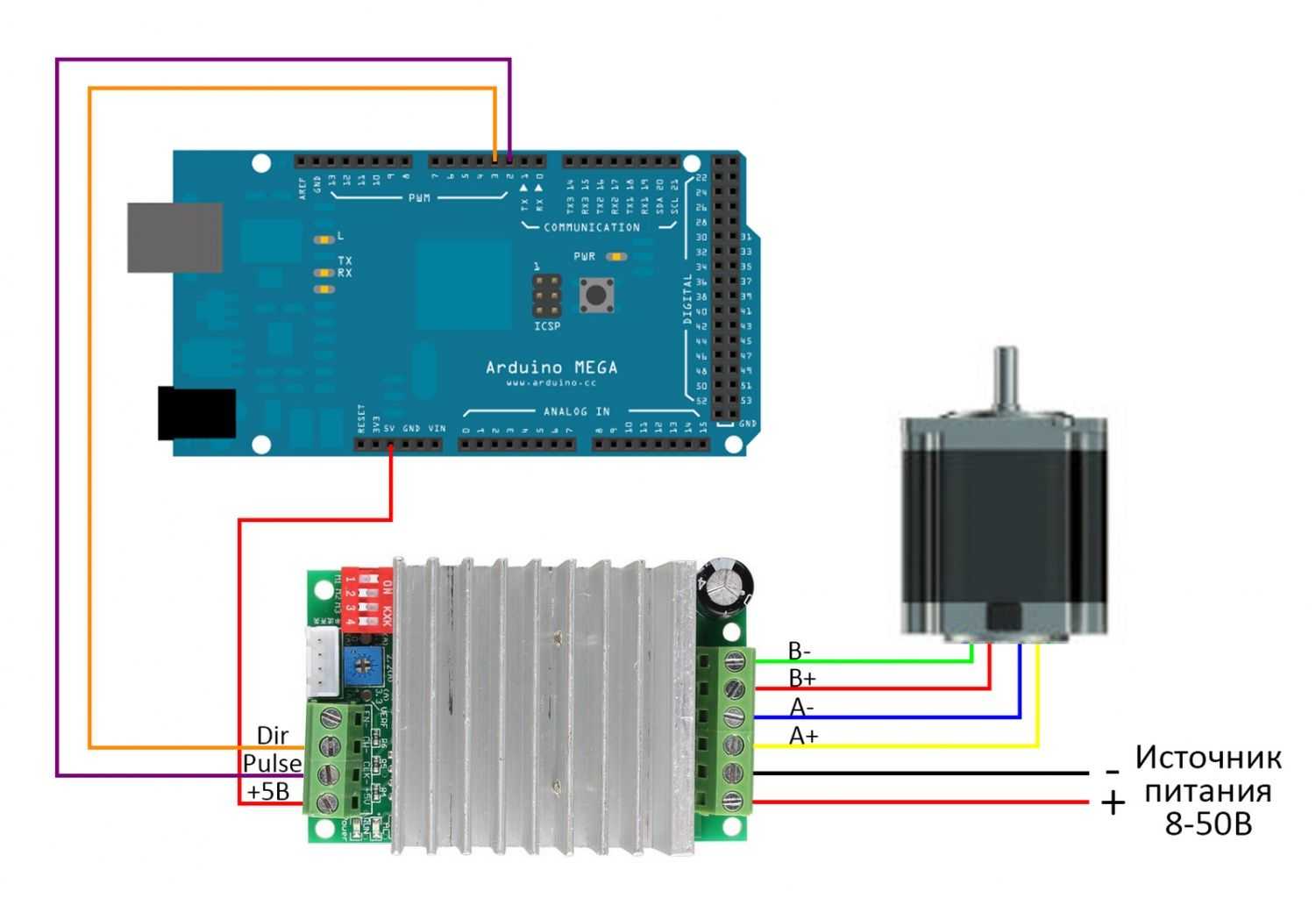
Подключение шагового двигателя к Ардуино
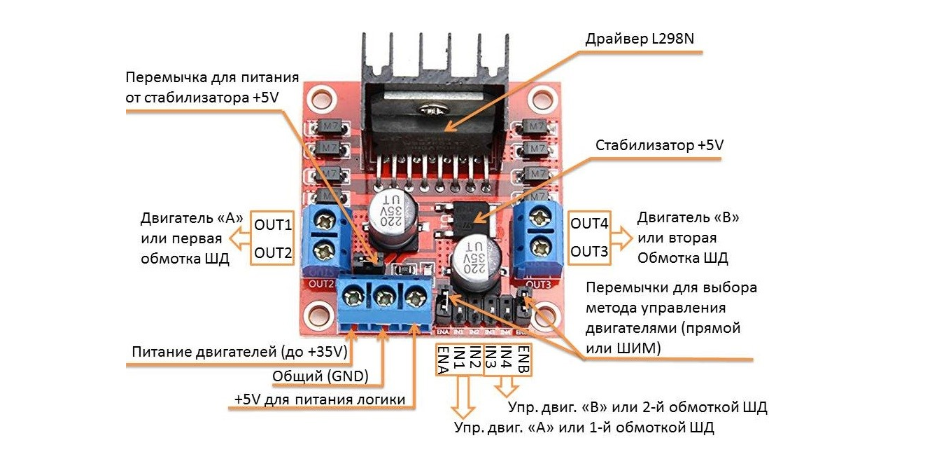
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
![]()
Подключение шагового двигателя к Ардуино
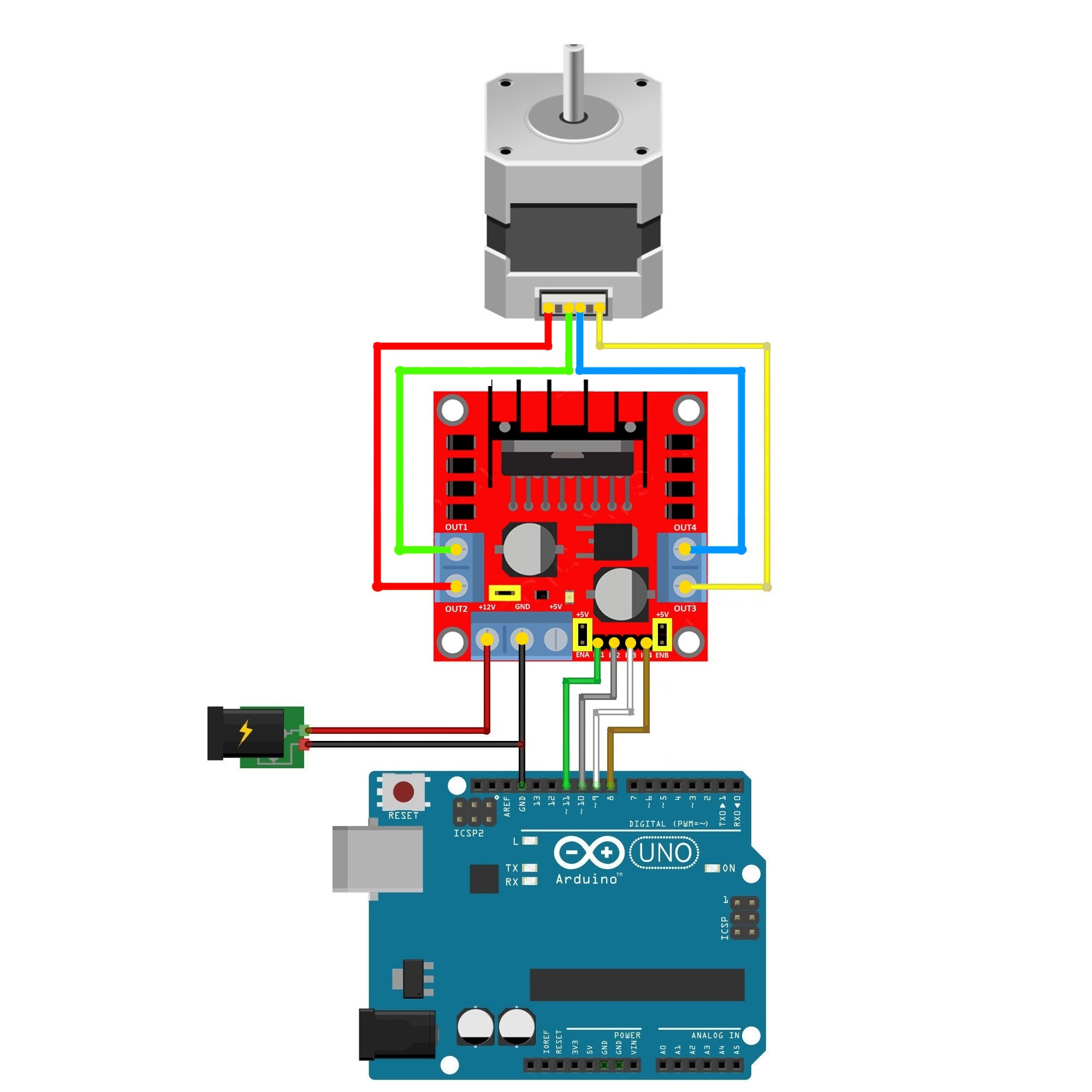
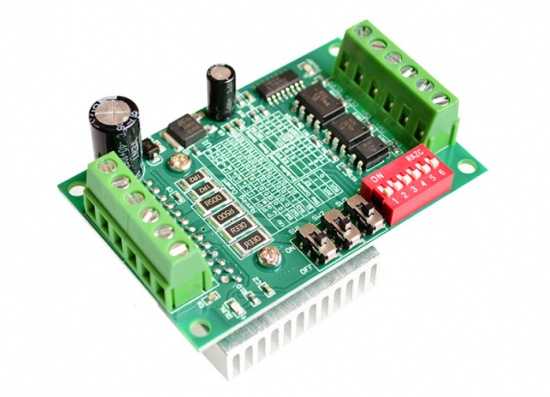
Еще один вариант схемы с использованием L298:
![]()
Подключение шагового двигателя к Ардуино на базе L298
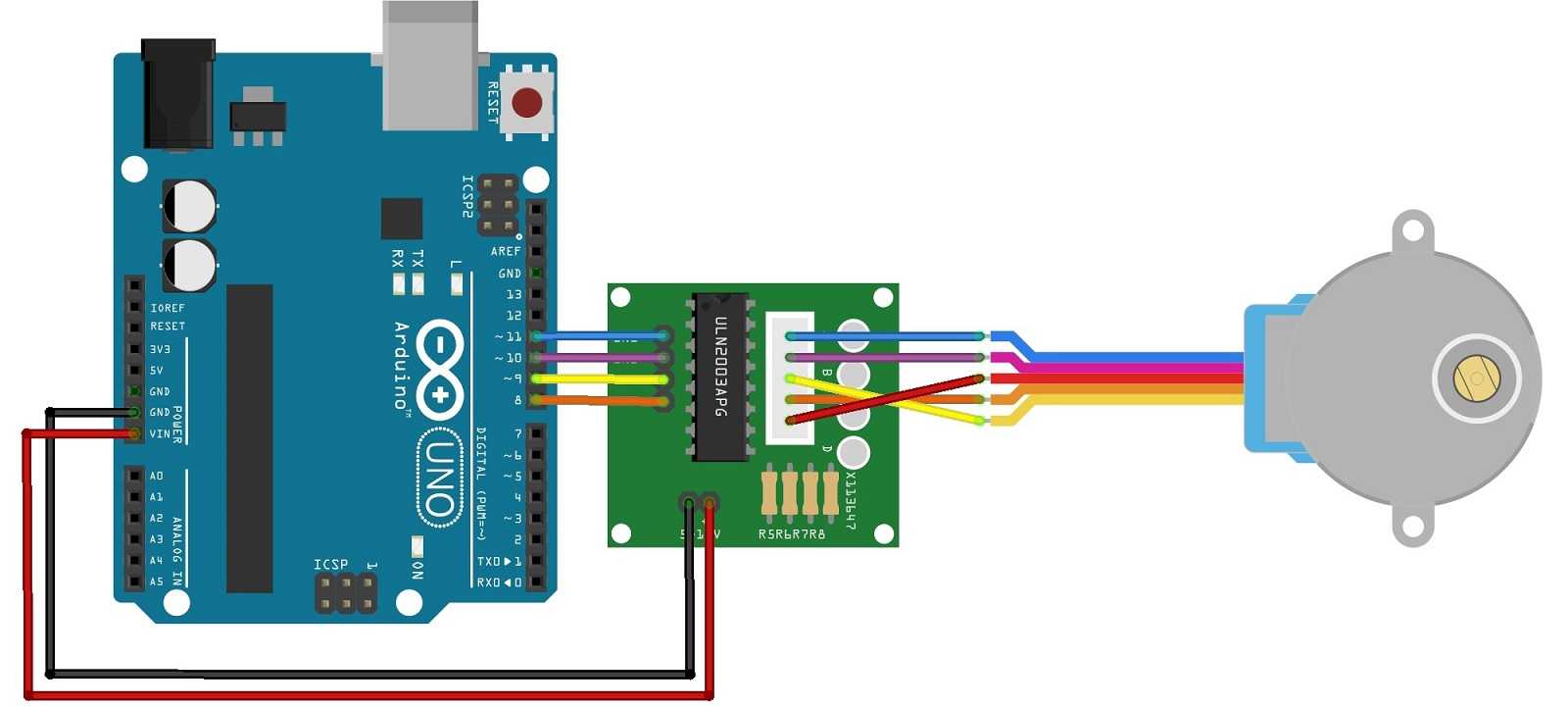
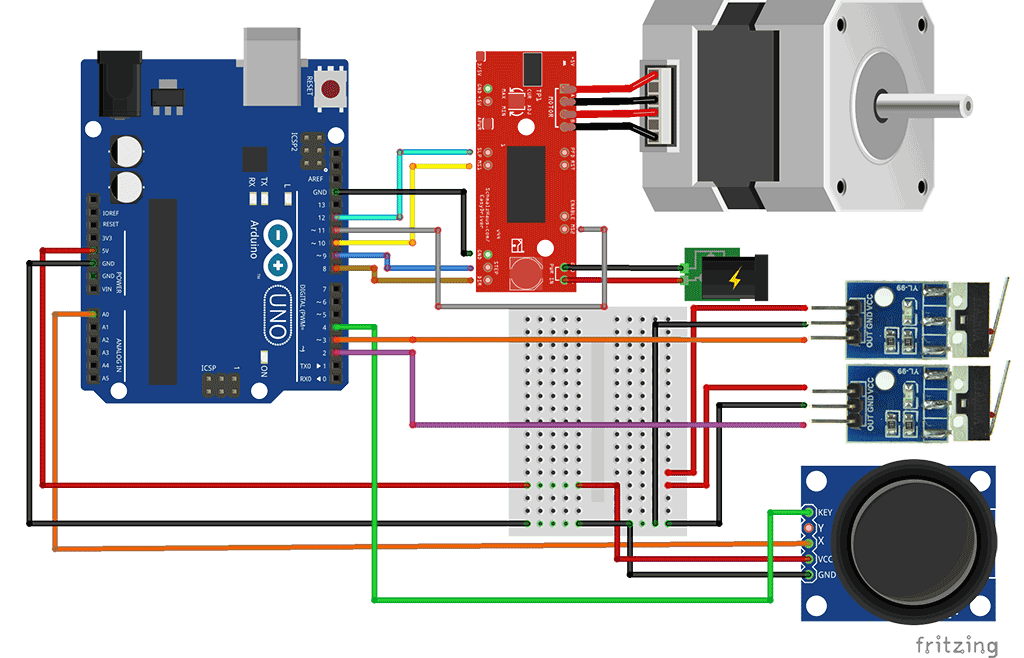
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
![]()
Подключение шагового двигателя к Ардуино
Принципиальная схема подключения.
![]()
Принципиальная схема подключения шагового двигателя
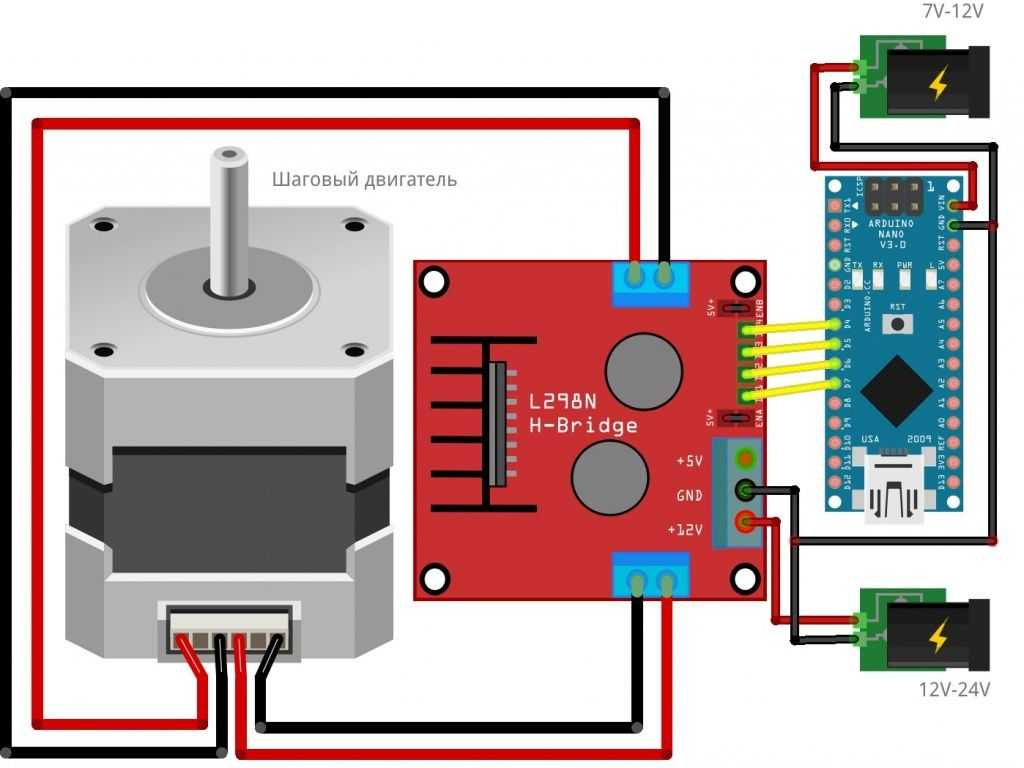
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.
![]()
Генератор ne555 для шагового двигателя
Шаговый двигатель представляет собой особый тип двигателя, вал которого перемещается точно на определенный градус с каждым новым поступающим импульсом. Чтобы управлять шаговым двигателем, мы должны организовать определенный порядок формирования управляющего напряжения, которое поступает на выводы обмоток электродвигателя.
Ниже приведено несколько примеров подключения шагового двигателя без применения микроконтроллеров с использованием таймера NE555
Эту достаточно сложную задачу попробуем решить при помощи таймера NE555 и двух интегральных микросхем CD4070 (К1561ЛП14) и CD4027(K561ТВ1).
Таймер 555 будет генерировать поток тактовых импульсов для управления скоростью вращения шагового двигателя. Тогда как микросхемы DD2 и DD3 будут формировать последовательно сигналы в правильном порядке, чтобы электродвигатель начал вращаться.
![]()
Вращая ручку переменного резистора можно изменять частоту сигнала, а значит и скоростью вращения.
Далее импульсы подаются на вход двух JK-тригеров (CD4027), которые формируют управляющие импульсы в необходимом порядке. Цепь на микросхеме CD4070 позволяет менять вращение на противоположное при помощи переключателя SA1. Для снижения нагрузки на выходы DD3 использованы 4 транзистора и 4 диода для защиты транзисторов от всплесков самоиндукции.
Схема простого контроллера шагового двигателя приведена на рисунке:
![]()
![]()
или использовать к примеру микросхему UNL2003
Источник
Радиолюбитель
Схема стабилизатора тока на таймере 555 для питания светодиодов и других устройств, где требуется поддержание заданного тока при изменении напряжения
На таймере 555 существует множество схем , хочу дополнить этот список ещё одной схемой. Данный стабилизатор был сделан для поддержания тока 0,7 А при изменении питающего напряжения в пределах 10-14,4 вольт. При использовании другого питающего напряжения потребуется дополнительная настройка.
Подбором R1 (t1, рис 2) и R3 (t2,рис 2) можно регулировать максимальный ток, при минимальном напряжении. Подбором R4 регулируется длительность промежутка t3 (рис.3) при максимальном напряжении. Резистором R6 устанавливается требуемый ток стабилизации.
C1 –времязадающий конденсатор, с его помощью задается частота на которой будет работать данная схема. Цепь заряда С1 –R1,VD1. Цепь разряда С1 –VD2, R4, R3 и открытый переход Э-К транзистора VT2. Как только ток нагрузки вырастет до установленного уровня откроется VT1, подав закрывающее напряжение на базу VT2 через R2. Исключая цепь разряда через VT2, остается только VD2, большое сопротивление R4 и выв. 7 таймера. Частота уменьшается до минимума, до тех пор, пока ток не уменьшится ниже установленного уровня. Дроссель L1 намотан на ферритовом кольце НМ2000 K20x4x6 и содержит 50 витков провода диаметром 0,2 мм намотанных параллельно в 5 проводов. Транзисторы VT1, VT2 (кт3107) любые маломощные. Транзистор VT3 выпаян из старой компьютерной материнской платы. Диоды VD1, VD2 высокочастотные кремниевые маломощные, VD3 (диод шоттки) снят с радиатора от сгоревшего компьютерного БП. Если эту схему предполагается использовать при токах более 1 А транзистор VT3 следует установить на теплоотвод. Данную схему можно применить не только для светодиодов, а так же для ламп, электродвигателей, там где необходим стабилизированный ток при изменении питающих напряжений.
Печатная плата устройства в формате .lay:
Печатная плата таймера на 555 в формате .lay (50.3 KiB, 1,708 hits)
Программа для расчета частоты таймера 555:
Скачать программу:
Программа для расчета частоты таймера 555 (343.7 KiB, 2,232 hits)
Справочные данные по таймеру 555: Таймер 555 – аналоговая интегральная схема, устройство для формирования (генерации) одиночных и повторяющихся импульсов со стабильными временными характеристиками. Применяется для построения различных генераторов, модуляторов, реле времени. Российскими аналогами таймеров типа 555 являются КР1006ВИ1 и КР1087ВИ2. КР1087ВИ3 — сдвоенный таймер (аналог 556); КР1087ВИ1 — счетверённый таймер (аналог 558). Следует заметить, что таймер КР1006ВИ1 по своей логике работы имеет одно отличие от прототипа NE555, а именно вход останова R отечественной микросхемы имеет приоритет над входом запуска S, а у других микросхем — наоборот. Данное обстоятельство не отражено в официальной документации к микросхеме КР1006ВИ1 и потому нередко становилось причиной проблем у неискушённых радиолюбителей. К счастью, в большинстве конструкций, где используется таймер, приоритеты входов R и S не играют роли. Выпускаются различные экономичные аналоги таймера, выполненные по КМОП-технологии, например это микросхемы ICM7555IPA, GLC555 и их отечественный аналог КР1441ВИ1.


Основные параметры таймера 555:
Микросхема состоит из делителя напряжения с двумя опорными напряжениями для сравнения, двух прецизионных компараторов (низкого и высокого уровней), RS-триггера с дополнительным входом сброса, транзисторного ключа с открытым коллектором и выходного усилителя мощности для увеличения нагрузочной способности.
Номинальное напряжение питания базовой версии микросхемы может находиться в пределах от 5 В ± 10 % до 15 В ± 10 % (т. е. 4,5…16,5 В), однако некоторые производители подняли верхний предел напряжения питания до 18 В. КМОП-версии отличаются возможностью работы при пониженном напряжении питания (от 2 В).
Потребляемый микросхемой ток может достигать величины 6…15 мА в зависимости от напряжения питания (6 мА при VCC = 5 В и 15 мА при VCC = 15 В). Типовое потребление бывает меньше и обычно составляет 3…10 мА в состоянии низкого уровня и 2…9 мА — в состоянии высокого. Ток потребления КМОП-версий таймера не превышает сотен микроампер.
Максимальный выходной ток для отечественной КР1006ВИ1 и КМОП-версий таймера составляет 100 мА. Большинство ныне выпускаемых зарубежных аналогов, выполненных по биполярной технологии, допускает выходной ток до 200 мА и более.
Смотреть (скачать) даташит таймера 555:
Даташит таймера 555 (239.1 KiB, 3,440 hits)
Простой формирователь профиля управления шаговыми двигателями
Texas Instruments LM555
Richard Brien
Шаговые двигатели являются синхронными устройствами, которые последовательно поворачиваются на один шаг с приходом каждого управляющего импульса. Чтобы мотор вращался быстрее, частота импульсов должна быть выше. Однако из-за инерции вала двигателя и нагрузки очень часто мотор не способен за один шаг разогнаться от 0 об/мин до требуемой угловой скорости. Поэтому на большинство шаговых двигателей сначала подается последовательность импульсов небольшой частоты, а затем частота плавно увеличивается до тех пор, пока двигатель не наберет желаемую скорость. Точно также, для остановки мотора импульсная последовательность не обрывается резко; частота импульсов должна постепенно снижаться до нуля. Микропроцессоры могут легко формировать импульсные последовательности линейно нарастающей, а затем спадающей частоты, часто называемые трапецеидальным профилем, но в схеме без микропроцессора реализовать такой профиль трудно.
![]()
Показанная на Рисунке 1 бистабильная схема на основе таймера 555 может легко формировать псевдотрапецеидальный профиль движения
Обратите внимание, что времязадающая цепочка, состоящая резистора R1 и связанных с ним компонентов, не подключается к VCC, как это было бы в обычной схеме, а получает питание через кнопочный выключатель
|
|
|
| Рисунок 1. | Эта схема формирует псевдотрапецеидальный профиль управления движением шаговых двигателей. |
При нажатии кнопки конденсатор C1 начинает заряжаться до уровня, при котором сможет начать заряжаться C2. По мере заряда С1 выходная частота 555 медленно и постепенно увеличивается до значения, которое определяется номиналами всех компонентов времязадающей цепи. Эта конечная частота ниже той, которой достигла бы схема, если бы в цепочке отсутствовали C1 и R1. При отпускании кнопки таймер 555 не прекращает генерацию сразу, а плавно понижает частоту, пока не остановится совсем (Рисунки 2а и 2б). Профиль изменения генерируемых частот не соответствует линейному, но в большинстве систем с микропроцессорами он также не бывает линейным. Характер изменения частоты в схемы должен быть похож на профиль, изображенный Рисунке 2а, и зависит от номиналов компонентов.
|
|
|
| Рисунок 2. | Профиль движения для схемы на Рисунке 1 является примерно трапецеидальным (а); шаговые импульсы сначала имеют низкую частоту, которая затем повышается и понижается (б). |
Управлять этой схемой можно с помощью простой кнопки. Такая концепция открывает возможности ручного управления шаговыми двигателями. Обычно ручное управление шаговыми двигателями не используется из-за сложности аппаратного формирования трапецеидального профиля частоты. С помощью предложенной схемы можно использовать низкооборотные шаговые двигатели с низким крутящим моментом в системах, в которых ранее потребовались бы редукторные двигатели постоянного тока. Заменив кнопку двухполюсным двухпозиционным переключателем, можно без микропроцессорного управления задавать направление вращения двигателя (Рисунок 3). Эти концепции также применимы к линейным приводным устройствам на основе шаговых двигателей. Кроме того, можно заменить кнопку управляющим сигналом от компьютера или контроллера, что позволит управлять шаговыми двигателями с помощью контроллеров, не поддерживающих функции формирования изменяющейся частоты.
|
|
|
| Рисунок 3. | Заменив кнопку в схеме на Рисунке 1 двухполюсным двухпозиционным переключателем, можно без микропроцессора управлять направлением вращения двигателя. |
Материалы по теме
- Datasheet Texas Instruments LM555
- Datasheet Allegro MicroSystems UCN5804B
Перевод: AlexAAN по заказу РадиоЛоцман
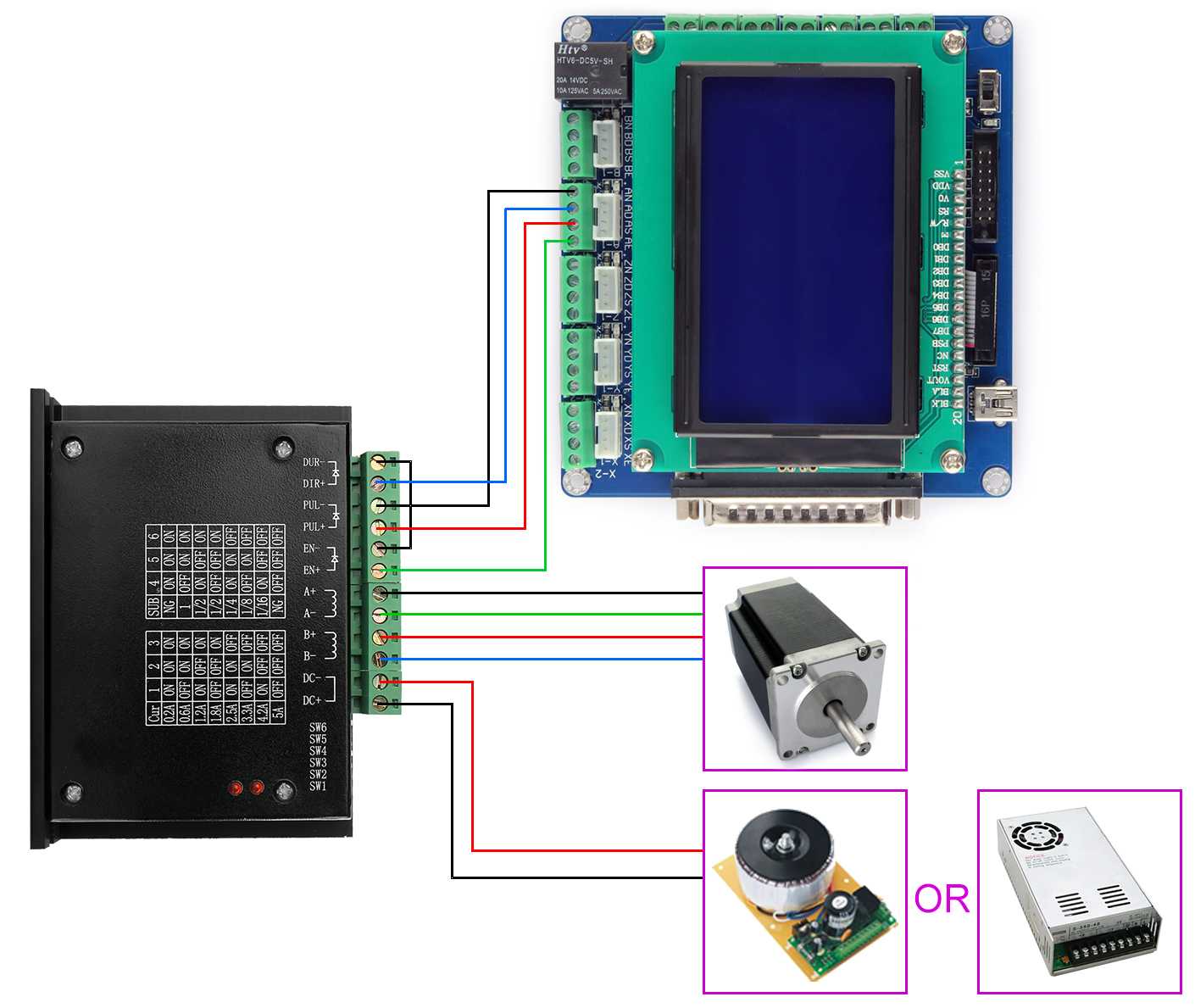
Подключение шагового двигателя
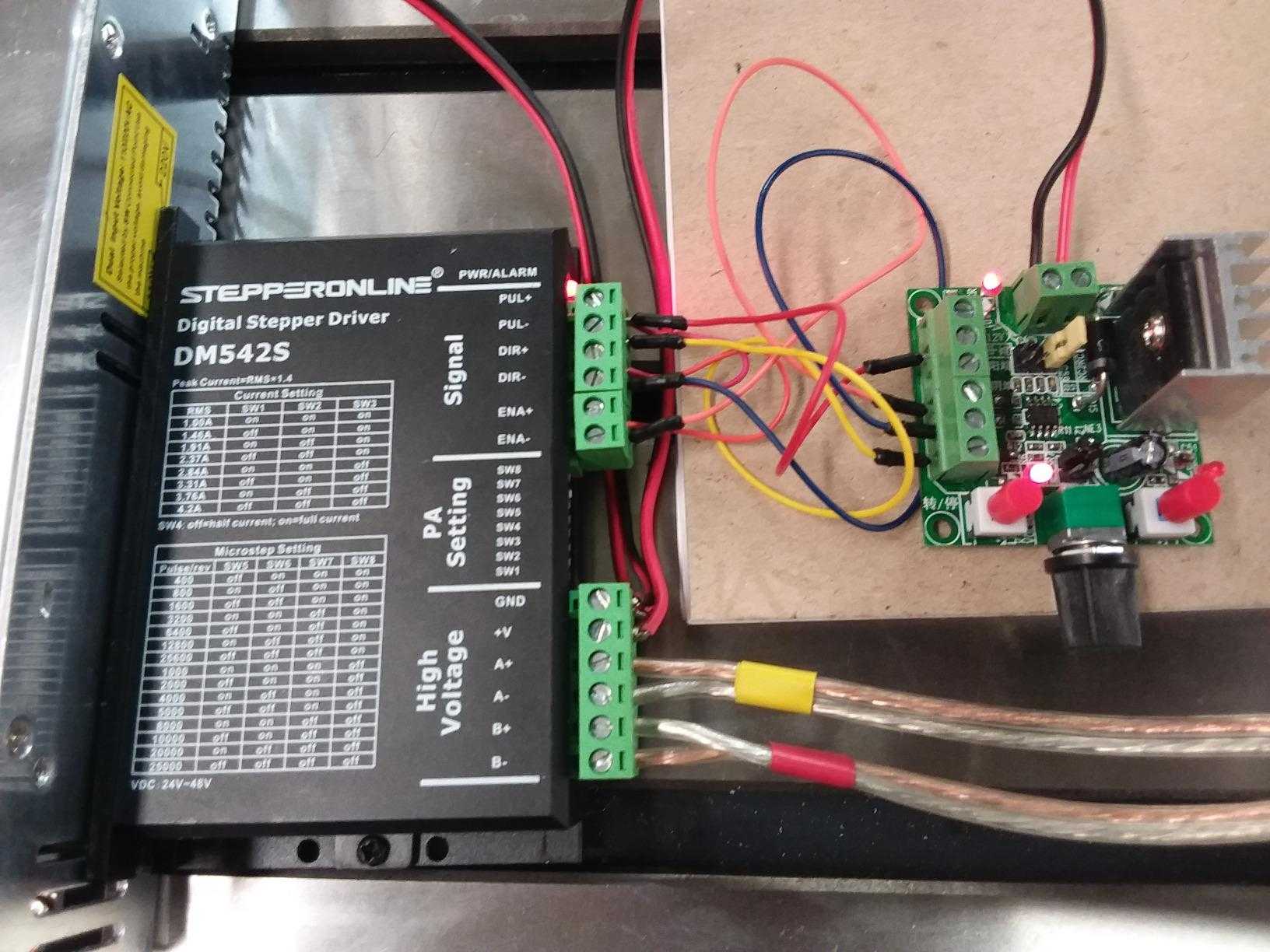
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.



